
Data pipeline plugins¶
Driven by datasets, wis2box is a plugin architecture orchestrating all the required components of a WIS2 Node. wis2box also provides a data pipeline plugin architecture which allows for users to define a plugin based on a dataset identifier to publish incoming data (see Data mappings for more information).
See also
See also
Default pipeline plugins¶
wis2box provides a number of data pipeline plugins by default, which users can be used “out of the box”. The list below describes each plugin and provides an example data mappings configuration.
wis2box.data.csv2bufr.ObservationDataCSV2BUFR¶
This plugin converts CSV observation data into BUFR using csv2bufr.
A template is required to convert the CSV columns to BUFR encoded values, you can use the built-in templates or create your own custom template.
A file-pattern is used to filter on incoming data based on a regular expression.
A typical csv2bufr plugin workflow using one of the built-in templates would be defined as follows:
csv:
- plugin: wis2box.data.csv2bufr.ObservationDataCSV2BUFR
template: aws-template # using one of the built-in templates
notify: true # trigger GeoJSON publishing for API and UI
file-pattern: '^.*\.csv$'
In this the example aws-template refers to the aws_example.json template defined by the csv2bufr-templates repository.
Environment variables can be set in wis2box.env to customize the behavior of the csv2bufr-plugin within the wis2box, see csv2bufr-environment-variables for the full list of environment variables.
The wis2box API will compare the location in the BUFR produced by the csv2bufr plugin with the location of the station in the wis2box station list.
For fixed land stations, if the station location and data location are more than WIS2BOX_OBSERVATION_DISTANCE_THRESHOLD meters apart, the data will not be published.
The default value for WIS2BOX_OBSERVATION_DISTANCE_THRESHOLD is 1000 meters, but you can change this in wis2box.env:
WIS2BOX_OBSERVATION_DISTANCE_THRESHOLD=20000 # set the threshold to 20 km
Using the csv2bufr plugin with a custom template¶
To create a custom template for the csv2bufr plugin in the wis2box, you can follow these steps:
Login to the wis2box-api container:
python3 wis2box-ctl.py login wis2box-api
Within the wis2box-api container you can using the command csv2bufr mappings create and provide the BUFR-descriptors you want to encode as arguments. Make sure to redirect the output to a file in the /data/wis2box/mappings directory (which is mapped to the host system at $WIS2BOX_HOST_DATADIR/mappings)
For example, to create a custom template for the csv2bufr plugin with the BUFR-descriptors 301150, 301011, 301012, 301021, 007031, 302001, run the following command:
csv2bufr mappings create 301150 301011 301012 301021 007031 302001 --output /data/wis2box/mappings/my_own_template.json
See the Manual on Codes to find the BUFR-descriptors you need.
Exit the container after creating the custom template:
exit
You can edit the template file on the host system at $WIS2BOX_HOST_DATADIR/mappings/my_own_template.json to customize the template further.
Note
After adding a new custom template, you need to restart the wis2box-api container for the changes to take effect:
python3 wis2box-ctl.py restart wis2box-api
After creating the custom template, you can use it in the csv2bufr plugin configuration in MCF as follows:
csv:
- plugin: wis2box.data.csv2bufr.ObservationDataCSV2BUFR
template: /data/wis2box/mappings/my_own_template.json # locally created csv2bufr mapping (located in $WIS2BOX_HOST_DATADIR/mappings)
notify: true # trigger GeoJSON publishing for API and UI
file-pattern: '^.*\.csv$'
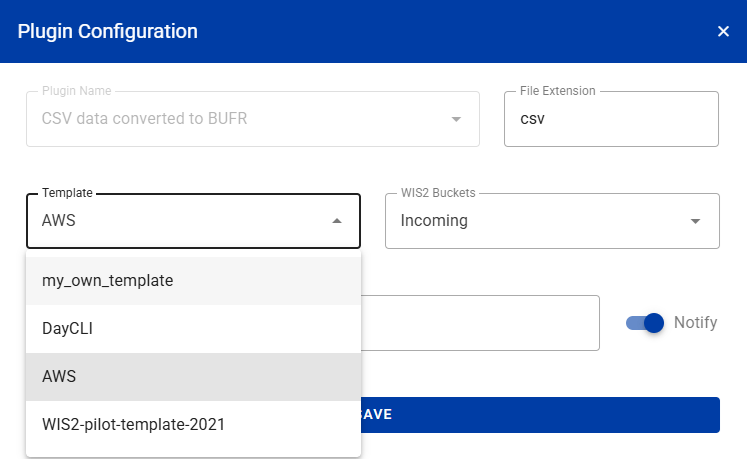
And/or you can select the new template in the Plugin Configuration of the Dataset Mappings Editor in the wis2box-webapp:
wis2box.data.bufr4.ObservationDataBUFR2GeoJSON¶
This plugin is typically used for wis2box API publication, and converts BUFR
observation data into GeoJSON using bufr2geojson. A file-pattern
can be used to filter on incoming data based on a regular expression. Consult the bufr2geojson documentation
for more information on configuration and templating.
A typical bufr2geojson plugin workflow definition would be defined as follows:
bufr4:
- plugin: wis2box.data.bufr2geojson.ObservationDataBUFR2GeoJSON
file-pattern: '^.*\.bufr4$'
wis2box.data.geojson.ObservationDataGeoJSON¶
This plugin is for the purposes of publishing GeoJSON data to the API.
wis2box.data.synop2bufr.SYNOP2BUFR¶
This plugin converts SYNOP ASCII data into BUFR using synop2bufr. A file-pattern can be used
to filter on incoming data based on a regular expression.
Note that the regular expression must contain two groups (for 4-digit year and 2-digit month), which are used as part of synop2bufr processing. Consult the synop2bufr documentation for more information.
A typical synop2bufr plugin workflow definition would be defined as follows:
txt:
- plugin: wis2box.data.synop2bufr.ObservationDataSYNOP2BUFR
notify: true # trigger GeoJSON publishing for API and UI
file-pattern: '^station_123_(\d{4})(\d{2}).*.txt$' # example: station_123_202305_112342.txt (where 2023 is the year and 05 is the month)
wis2box.data.bufr4.ObservationDataBUFR¶
This plugin takes an incoming BUFR4 data file and separates it into individual BUFR bulletins if there is more than one in a file. Those bulletins are then further divided into individual subsets for publication on WIS2. As part of the process, files are quality checked for valid WIGOS Station Identifiers and location information. Where these are missing, the information is either infilled using the wis2box station list or the subset discarded if no match is found. Missing temporal information results in the data being discarded.
For processing efficiency, and to allow for concurrent processing, it is recommended that the input data to this plugin is already separated into one BUFR message per file and one subset per message.
A typical BUFR4 plugin workflow definition would be defined as follows:
bin:
- plugin: wis2box.data.bufr4.ObservationDataBUFR
notify: true # trigger GeoJSON publishing for API and UI
file-pattern: '^.*\.bin$'
This plugin allows for overriding and updating various BUFR elements prior to data publication.
For example, to correct the station elevation for a specific WIGOS Station Identifier and set the BUFR header centre to 98 for all messages, add the following to the dataset mapping configuration:
bufr_overrides:
"0-20000-0-16344":
"#1#heightOfStationGroundAboveMeanSeaLevel": 150
all:
"bufrHeaderCentre": 98
wis2box.data.cap_message.CAPMessageData¶
This plugin takes the incoming XML file, then validates it against the CAP v1.2 schema and optionally verifies the digital signature before publishing.
The validation is performed using the capvalidator package.
A typical CAP message plugin workflow definition would be defined as follows:
xml:
- plugin: wis2box.data.cap_message.CAPMessageData
notify: true
buckets:
- ${WIS2BOX_STORAGE_INCOMING}
file-pattern: '^.*\.xml$'
By default the XML signature validation is set to False. To enable the validation add the following environment variable to your wis2box.env file:
CHECK_CAP_SIGNATURE=True
wis2box.data.universal.UniversalData¶
This plugin can be used to publish any data, without any transformation.
The plugin takes any incoming data, copies it to the /data endpoint configured in wis2box, providing minimal information in the WIS2 Notification:
properties.datatimein the WIS2 notification is parsed asmatch.group(1)of the regular expression defined in the plugin configuration. If the group cannot be parsed bydateutil.parser, an error will be raised and the data will not be publishedgeometryin the WIS2 Notification will be null
For example, to publish GRIB2 data matching the file-pattern ^.*_(\d{8})\d{2}.*\.grib2$ the following configuration could be used:
grib2:
- plugin: wis2box.data.universal.UniversalData
notify: true
buckets:
- ${WIS2BOX_STORAGE_INCOMING}
file-pattern: '^.*_(\d{8})\d{2}.*\.grib2$' # example: Z_NAFP_C_BABJ_20231207000000_P_CMA-GEPS-GLB-036.grib2 (where 20231207000000 will be used as the datetime)
See Data mappings for a full example data mapping configuration.